Optimización de un sistema auxiliar postural ergonómico para aplicación en operaciones industriales.
M.C. Kenia Madeleyn Ortíz Morales
Acerca del proyecto
El diseño fue desarrollado a partir de una metodología integrada que incluyó: análisis antropométrico nacional, modelado paramétrico, simulaciones estructurales mediante el Método de Elementos Finitos (FEM), y un análisis estático y dinámico del sistema con dos grados de libertad. El dispositivo está compuesto por una estructura ligera de aluminio 6061-T6, optimizada para soportar cargas de hasta 120 kg, y cuenta con un sistema de sujeción modular en región lumbar, muslos y tobillos.
Justificación
En México, las enfermedades laborales más comunes son musculoesqueléticas, principalmente dolor lumbar y cervical, ocasionadas por esfuerzos repetitivos y posturas prolongadas. Estas afectan la salud, el rendimiento y generan altos costos económicos, representando hasta el 12% del PIB en América Latina. Los exoesqueletos existentes son costosos y poco adaptables, por lo que este proyecto busca desarrollar un diseño ligero, ergonómico y ajustable a cualquier operario y estación de trabajo.
Objetivo
Optimizar el diseño de un sistema postural de estructura ligera para su aplicación en operaciones industriales capaz de soportar una carga de operador de hasta 120 kg, el cual dé soporte al operador y permita descansar sus extremidades inferiores en los tiempos de espera o incluso poder realizar su operación sentado si es que la tarea a realizar lo permite, haciendo su tarea más cómoda y reduciendo el impacto de los esfuerzos musculoesqueléticos.
Desarrollo
Este trabajo presenta el diseño y optimización de un sistema auxiliar postural de aplicación industrial, cuyo objetivo es reducir los esfuerzos musculoesqueléticos y mejorar la calidad de vida del usuario. Se analizaron normativas (NOM-036, ISO 11226), fundamentos de ergonomía y antecedentes de exoesqueletos pasivos para establecer criterios de diseño.
Se desarrolló un marco teórico basado en mecánica de materiales, FEM y dinámica de sistemas. Posteriormente, se diseñó y simuló un prototipo inicial, evaluado bajo cargas de hasta 120 kg. A partir de los resultados, se realizó un rediseño optimizado con mejoras en geometría, mecanismos de bloqueo y sujeción ergonómica.
El sistema resultante es ergonómico, seguro y funcional, y se plantea como base para futuros desarrollos hacia un exoesqueleto activo con actuadores y control inteligente.
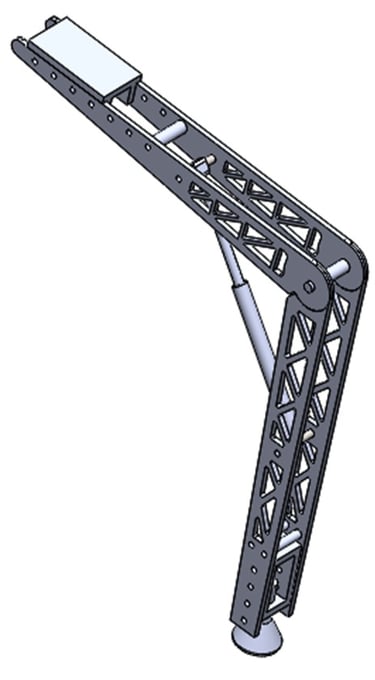
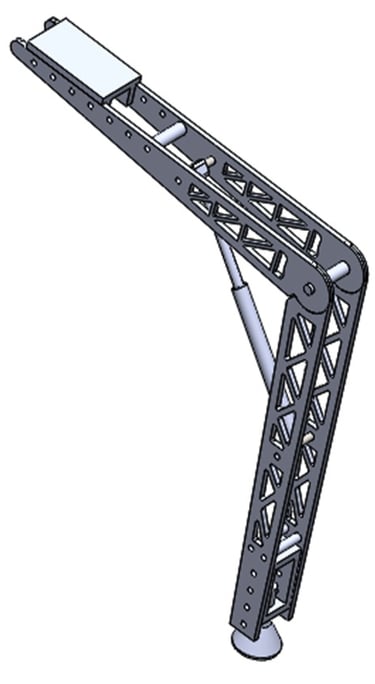


Diseño, modelado parametrizado y prototipado.
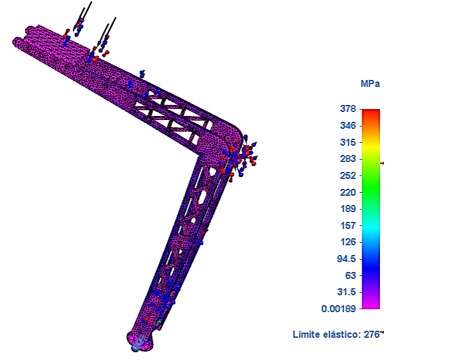
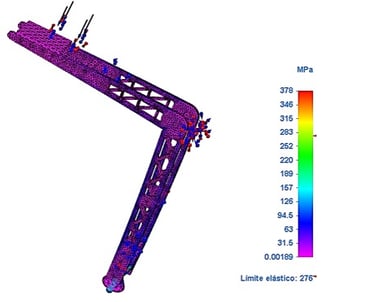
Análisis de Elementos Finitos.
En la figura de Análisis de Elementos Finitos, se muestran la distribución de esfuerzos de von mises en todo el rediseño del sistema postural, se observa que los esfuerzos máximos presentes son de 378 MPa, magnitud que sobrepasa el límite elástico del Aluminio 6061-T6, es necesario mencionar que estos esfuerzos no se presentan en los eslabones, se presentan en la base que va en el suelo, es necesario mencionar que dicha pieza se debe considerar de acero, material que tiene un valor mayor al del aluminio, por lo que el dispositivo podrá soportar sin problema.
Se consideraron datos antropométricos de la población mexicana (1.64 m, 120 kg) que a través del método de Drillis y Contini permiten adaptarlo al mexicano promedio, se modeló el diseño en CAD y se evaluó su comportamiento dinámico mediante ecuaciones de Euler-Lagrange, que permitió el cálculo e implementación de un pistón bloqueable tipo Bansbach Easylift. El análisis estático y dinámico confirmó torques bajos y compatibles con el diseño. Además, se verificaron propiedades del aluminio 6061-T6 y se aplicó un análisis FEM con carga de 588.6 N, lo que permite simular y validar el desempeño del dispositivo en condiciones reales.
El desarrollo de un sistema auxiliar postural ergonómico es pertinente y está alineado con la reciente implementación de normativas como la Ley Silla. Esta propuesta contribuye a la mejora de condiciones laborales mediante una solución adaptable, cómoda y de bajo peso.
Conclusión
17th International Conference on Advanced Computational Engineering and Experimenting
Participación de ponencia en congreso internacional Barcelona, España 2024.






M.C. Kenia Madeleyn Ortíz Morales
AUTORA


Dr. Juan Alfonso Beltrán Fernández
DIRECCIÓN
Ing. Ricardo González Romano
PROTOTIPAJE

